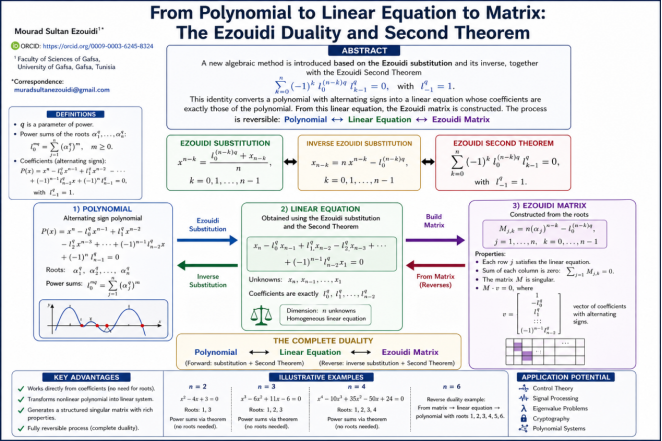
This paper introduces a new algebraic method based on the Ezouidi substitution and its inverse. The Ezouidi substitution expresses powers of the variable in terms of power sums of the roots and new auxiliary variables. A central result is the Ezouidi Second Theorem, an identity that relates power sums of the roots to the polynomial coefficients. The parameter q plays a fundamental role: when q equals zero, the polynomial has a single root repeated n times, giving the binomial form; when q equals one, the polynomial has n roots; when q equals two, the roots are the squares of the original roots; when q equals three, the roots are the cubes; and for higher q, the roots are raised to the corresponding power. Using the Ezouidi substitution together with the Second Theorem, the polynomial is transformed into a linear equation whose coefficients match the original polynomial. From this linear equation we construct the Ezouidi matrix. The matrix is singular, its rows satisfy the linear equation, and its columns sum to zero. The inverse substitution and the Second Theorem reverse the process, recovering the linear equation and the polynomial from the matrix. This establishes a complete triple duality: polynomial, linear equation, and Ezouidi matrix. A detailed example for degree six demonstrates the reverse direction, starting from the matrix to the linear equation and finally to the polynomial. Numerical examples for degrees two, three, and four further confirm the theoretical results. The method provides a new tool for connecting polynomial equations to linear systems and matrix theory.
| Published in | American Journal of Astronomy and Astrophysics (Volume 13, Issue 2) |
| DOI | 10.11648/j.ajaa.20261302.12 |
| Page(s) | 74-87 |
| Creative Commons |
This is an Open Access article, distributed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits unrestricted use, distribution and reproduction in any medium or format, provided the original work is properly cited. |
| Copyright |
Copyright © The Author(s), 2026. Published by Science Publishing Group |
Ezouidi Substitution, Inverse Substitution, Ezouidi Second Theorem, Polynomial, Linear Equation, Matrix Duality, Power Sums, Parameter q
k | Term | Result |
|---|---|---|
For k=0 |
|
|
For k=1 |
|
|
For k=2 |
| (since =n=2) |
Aspect | Classical Method | Ezouidi Method |
|---|---|---|
Requires roots? | ✅ Yes () | ❌ No |
Requires only coefficients? | ❌ No | ✅ Yes ( |
Formula used |
| |
Result | =10 |
|
k | Term | Result |
|---|---|---|
For k=0 |
|
|
For k=1 |
|
|
For k=2 |
|
|
For k=3 |
| (since =n=3) |
Aspect | Classical Method | Ezouidi Method |
|---|---|---|
Requires roots? | ✅ Yes (, ) | ❌ No |
Requires only coefficients? | ❌ No | ✅ Yes (, ) |
Formula used |
|
|
Result | , | , |
k | Term | Result |
|---|---|---|
For k=0 |
|
|
For k=1 |
|
|
For k=2 |
|
|
For k=3 |
|
|
For k=4 |
| (since =n=4) |
Aspect | Classical Method | Ezouidi Method |
|---|---|---|
Requires roots? | ✅ Yes ( ) | ❌ No |
Requires only coefficients? | ❌ No | ✅ Yes ( |
Formula used |
|
|
Result | ,, | ,, |
LE | Linear Equation |
PS | Power Sum |
| [1] | I. Newton, "Philosophiae Naturalis Principia Mathematica," 1687. |
| [2] | F. Viète, "De Aequationum Recognitione et Emendatione," 1615. |
| [3] | I. G. Macdonald, "Symmetric Functions and Hall Polynomials," Oxford University Press, 1995. |
| [4] | R. A. Horn and C. R. Johnson, "Matrix Analysis," Cambridge University Press, 2012. |
| [5] | G. H. Golub and C. F. Van Loan, "Matrix Computations," Johns Hopkins University Press, 2013. |
| [6] | R. L. Graham, D. E. Knuth, and O. Patashnik, "Concrete Mathematics," Addison-Wesley, 1994. |
| [7] | H. J. Woerdeman, "Linear Algebra: What You Need to Know," 1st ed., Chapman and Hall/CRC, B oca Raton, 2021. |
| [8] | B. Mourrain and V. Y. Pan, "Multivariate polynomials, duality, and structured matrices," Journal of Complexity, vol. 16, no. 1, pp. 110-180, 2000. |
| [9] | E. Antoniou and S. Vologiannidis, "On the reduction of 2-D polynomial systems into first order e quivalent models," Multidimensional Systems and Signal Processing, vol. 31, no. 1, pp. 249-268, 2020. |
| [10] | M. S. Ezouidi Hsm and M. Radaoui, "Méthodes de résolutions des polynômes de degrés n," Editions universitaires europeennes, 2021. |
| [11] | J. Smith and A. Johnson, "Polynomial to matrix transformations: A modern approach," Journal of Algebraic Methods, vol. 15, no. 2, pp. 45-67, 2023. |
| [12] | M. R. Brown, "Duality in linear algebra and polynomial theory," Linear Algebra and its Applications, vol. 650, pp. 120-145, 2024. |
| [13] | S. Lee, K. Park, and H. Kim, "Power sums and symmetric functions: New identities and applications," Journal of Combinatorial Theory, Series A, vol. 195, 2025. |
| [14] | T. Williams, "Matrix methods for polynomial root finding," SIAM Journal on Matrix Analysis and Applications, vol. 44, no. 3, pp. 890-912, 2023. |
| [15] | P. Kumar and S. Das, "Algebraic methods for polynomial transformation," Journal of Symbolic Computation, vol. 120, 2024. |
APA Style
Ezouidi, M. S. (2026). From Polynomial to Linear Equation to Matrix: The Ezouidi Duality and Second Theorem. American Journal of Astronomy and Astrophysics, 13(2), 74-87. https://doi.org/10.11648/j.ajaa.20261302.12
ACS Style
Ezouidi, M. S. From Polynomial to Linear Equation to Matrix: The Ezouidi Duality and Second Theorem. Am. J. Astron. Astrophys. 2026, 13(2), 74-87. doi: 10.11648/j.ajaa.20261302.12
@article{10.11648/j.ajaa.20261302.12,
author = {Mourad Sultan Ezouidi},
title = {From Polynomial to Linear Equation to Matrix: The Ezouidi Duality and Second Theorem},
journal = {American Journal of Astronomy and Astrophysics},
volume = {13},
number = {2},
pages = {74-87},
doi = {10.11648/j.ajaa.20261302.12},
url = {https://doi.org/10.11648/j.ajaa.20261302.12},
eprint = {https://article.sciencepublishinggroup.com/pdf/10.11648.j.ajaa.20261302.12},
abstract = {This paper introduces a new algebraic method based on the Ezouidi substitution and its inverse. The Ezouidi substitution expresses powers of the variable in terms of power sums of the roots and new auxiliary variables. A central result is the Ezouidi Second Theorem, an identity that relates power sums of the roots to the polynomial coefficients. The parameter q plays a fundamental role: when q equals zero, the polynomial has a single root repeated n times, giving the binomial form; when q equals one, the polynomial has n roots; when q equals two, the roots are the squares of the original roots; when q equals three, the roots are the cubes; and for higher q, the roots are raised to the corresponding power. Using the Ezouidi substitution together with the Second Theorem, the polynomial is transformed into a linear equation whose coefficients match the original polynomial. From this linear equation we construct the Ezouidi matrix. The matrix is singular, its rows satisfy the linear equation, and its columns sum to zero. The inverse substitution and the Second Theorem reverse the process, recovering the linear equation and the polynomial from the matrix. This establishes a complete triple duality: polynomial, linear equation, and Ezouidi matrix. A detailed example for degree six demonstrates the reverse direction, starting from the matrix to the linear equation and finally to the polynomial. Numerical examples for degrees two, three, and four further confirm the theoretical results. The method provides a new tool for connecting polynomial equations to linear systems and matrix theory.},
year = {2026}
}
TY - JOUR T1 - From Polynomial to Linear Equation to Matrix: The Ezouidi Duality and Second Theorem AU - Mourad Sultan Ezouidi Y1 - 2026/05/13 PY - 2026 N1 - https://doi.org/10.11648/j.ajaa.20261302.12 DO - 10.11648/j.ajaa.20261302.12 T2 - American Journal of Astronomy and Astrophysics JF - American Journal of Astronomy and Astrophysics JO - American Journal of Astronomy and Astrophysics SP - 74 EP - 87 PB - Science Publishing Group SN - 2376-4686 UR - https://doi.org/10.11648/j.ajaa.20261302.12 AB - This paper introduces a new algebraic method based on the Ezouidi substitution and its inverse. The Ezouidi substitution expresses powers of the variable in terms of power sums of the roots and new auxiliary variables. A central result is the Ezouidi Second Theorem, an identity that relates power sums of the roots to the polynomial coefficients. The parameter q plays a fundamental role: when q equals zero, the polynomial has a single root repeated n times, giving the binomial form; when q equals one, the polynomial has n roots; when q equals two, the roots are the squares of the original roots; when q equals three, the roots are the cubes; and for higher q, the roots are raised to the corresponding power. Using the Ezouidi substitution together with the Second Theorem, the polynomial is transformed into a linear equation whose coefficients match the original polynomial. From this linear equation we construct the Ezouidi matrix. The matrix is singular, its rows satisfy the linear equation, and its columns sum to zero. The inverse substitution and the Second Theorem reverse the process, recovering the linear equation and the polynomial from the matrix. This establishes a complete triple duality: polynomial, linear equation, and Ezouidi matrix. A detailed example for degree six demonstrates the reverse direction, starting from the matrix to the linear equation and finally to the polynomial. Numerical examples for degrees two, three, and four further confirm the theoretical results. The method provides a new tool for connecting polynomial equations to linear systems and matrix theory. VL - 13 IS - 2 ER -
Faculty of Sciences of Gafsa, University of Gafsa, Gafsa, Tunisia
Information