The amount of water required to irrigate, is essential in agricultural planning. In Mexico the water required for irrigation is generally not estimated when it is carried out despite several estimation methods being available (direct and indirect). However, some methods can be very expensive, requiring preparation time to use them or time to obtain the results. One of the methods involves using sensors based on relative permittivity. This method have been widely used in agriculture because they show the percentage of water contained in the substrate. However, this value helps the producer know the soil moisture status of their crop in percentage units but does not tell them how much water needs to be added to each plant in liters. Knowing this value could help reduce water losses due to infiltration, thereby increasing the crop area. Therefore, it was developed a device capable of recommending the amount of water in v/v (volume of water/volume of soil) required to irrigate a crop. The prototype device was based on the BGT-SEC Z2TM sensor and the ATMEGA 2560TM microcontroller. The obtained device was calibrated and a specific model was developed for two types of soil: sandy (with an RMSE of 0.0107) and loamy (with an RMSE of 0.00556). With factory calibration, a RMSE value of 0.0339 was found for the loamy soil and 0.0278 for the sandy soil. In addition, the sensor was tested on strawberry plants with pots covered with and without plastic mulch (using loamy soil). The results on the strawberry plants, indicated that water consumption was best explained by the specific calibration equation for loamy soil covered with plastic mulch (67.8 mL RMSE) and without plastic mulch (82.8 mL RMSE). Finally, it was found that at least two measurements are required to obtain soil moisture average in plastic mulch strawberry pots and 6 measurements in pots without plastic mulch. With the above, it is concluded that the device developed in this study performed adequately during experiments and the sensor worked continuously without failing.
| Published in | American Journal of Agriculture and Forestry (Volume 12, Issue 5) |
| DOI | 10.11648/j.ajaf.20241205.11 |
| Page(s) | 317-324 |
| Creative Commons |
This is an Open Access article, distributed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits unrestricted use, distribution and reproduction in any medium or format, provided the original work is properly cited. |
| Copyright |
Copyright © The Author(s), 2024. Published by Science Publishing Group |
Water Volumetric Content, Sample Size, Acceptable Error, Sensor Accuracy
RMSQ | Root Mean Square Error |
DD | Day |
MM | Month |
TM | Trademark |
GRG | Generalized Reduced Gradient |
WGS84 | World Geodetic System 1984 |
LCD | Liquid Cristal Display |
TFT | Thin-Film Transistor |
HSD | Honestly Significant Difference |
v/v | Water Volume (m3) / Soil Volume (m3) |
| [1] | Li, Z., Leng, P., Zhou, C., Chen, K., Zhou, F., and Shang, G. Soil moisture retrieval from remote sensing measurements: Current knowledge and directions for the future. Earth-Science Reviews. 2021, 218, 103673. |
| [2] | Placidi, P., Gasperini, L., Grassi, A., Cecconi, M., and Scorzoni, A. Characterization of Low-Cost Capacitive Soil Moisture Sensors for IoT Networks. Sensors. 2020, 20(12), 3585. |
| [3] | Mane, S., Das, N., Singh, G., Cosh, M., and Dong, Y. Advancements in dielectric soil moisture sensor Calibration: A comprehensive review of methods and techniques. Computers and Electronics in Agriculture. 2024, 218, 108686. |
| [4] | Ellsäßer, F., Röll, A., Stiegler, C., and Hölscher, D. Introducing QWaterModel, a QGIS plugin for predicting evapotranspiration from land surface temperatures. Environmental Modelling & Software. 2020, 130, 104739. |
| [5] | Brach del Prever, P., Balducci G., Ballestra, A., Ghiglione, C., Mascheretti, L., Molinari, M., Nicoletti, G., Carvelli, V., Corbari, C., Invernizzi, S. and Mariani, S. Automatic and Non-Invasive Monitoring of Water Stress in Vineyards. Environmental Sciences Proceedings. 2023, 25(1), 79. |
| [6] | Abdelmoneim, A., Daccache, A., Khadra, R., Bhanot, M., and Dragonetti, G. Internet of Things (IoT) for double ring infiltrometer automation. Computers and Electronics in Agriculture. 2021, 188, 106324. |
| [7] |
Beijing Guoxinhuayuan Technology Co. Ltd. Soil temperature moisture EC Sensor BGT-SEC Z2, Sensor Manual. Available from:
www.bjgxhy.com (accessed 17 January 2024). |
| [8] |
Decagon Devices Inc. 10HS volume of sensitivity Application Note. Available from:
https://www.onsetcomp.com/sites/default/files/resources-documents/15925-C%2010HS%20Volume%20of%20Sensitivity.pdf (accessed 31 July 2024). |
| [9] |
Decagon Devices Inc. Teros 10 sensor manual. Available from:
http://www.misure.net/sites/default/files/pdf/20788_TEROS10_Manual_Web.pdf (accessed 31 July 2024). |
| [10] |
USDA. Guide to Texture by Feel. Available from:
https://www.nrcs.usda.gov/sites/default/files/2022-11/texture-by-feel.pdf (accessed 31 July 2024). |
| [11] | Lohr S. L. Sampling: design and analysis. 3rd Edition. New York. Chapman and Hall/CRC. 2021; pp. 1-50. |
| [12] |
R Core Team. R: a Language and Environment for Statistical Computing. Available from:
https://www.R-project.org/ (accessed 24 January 2024). |
| [13] | Royston P. Remark AS R94: A remark on Algorithm AS 181: The WW test for normality. Applied Statistics. 1995, 44, 547–551. |
| [14] | Bartlett M. S. Properties of sufficiency and statistical tests. Proceedings of the Royal Society of London Series. 1937, A (160), 268–282. |
| [15] |
de Mendiburu, F., and de Mendiburu, M. F. (2019). R Package ‘agricolae’ version 1.3-7. Available from:
https://cran.r-project.org/web/packages/agricolae/agricolae.pdf (accessed 31 July 2024). |
| [16] | Martínez-Saldaña, J., Vega-Sotelo, F., Medina-Cazares, T., Rivera-González, M., and Turiján-Camargo, S. Dinámica de humedad y temperatura del suelo en riego por goteo superficial y subsuperficial con acolchado plástico [Dynamics of Soil Water Content and Temperature in Surface and Subsurface Drip Irrigation with Soil Plastic Mulching]. Agrofaz. 2006, 6(3), 349-358. |
| [17] | Tenelanda-Patiño, D., Crespo-Sánchez, P., and Mosquera-Rojas, G. Umbrales en la respuesta de humedad del suelo a condiciones meteorológicas en una ladera Altoandina [Thresholds in the response of soil moisture to meteorological conditions on a high Andean hillslope]. Maskana. 2018, 9(2), 53-65. |
| [18] | Abanto-Rodríguez, C., Farias-Araújo, W., Cardoso-Chagas, P., Alves-Chagas, E., López-Monteiro, J., Da Silva-Siqueira, R., Martins-Barbosa, S., Ferreira-Melo, V. and Maffei-Valero, M. Calibration of frequency domain reflectometry sensors to estimate soil moisture in a Geric Xanthic Ferralsol. Bioagro. 2020, 32(2), 123-130. |
| [19] | Inzunza-Ibarra, M., Mendoza-Moreno, S., Catalán-Valencia, E., Villa-Castorena, M., Sánchez-Cohen, I., and Román-López, A. Productividad del chile jalapeño en condiciones de riego por goteo y acolchado plástico [Productivity of jalapeno pepper under drip irrigation and plastic mulch conditions]. Revista Fitotecnia Mexicana. 2007, 30(4), 429-436. |
| [20] | López-López, R., Arteaga-Ramírez, R., Vázquez-Peña, M., López-Cruz, I., and Sánchez-Cohen, I. Producción de tomate de cáscara (Physalis ixocarpa Brot.) basado en láminas de riego y acolchado plástico [Husk tomato (Physalis ixocarpa Brot.) production based on irrigation volume and plastic mulching]. Revista Chapingo. Serie horticultura. 2009, 15(1), 83-89. |
APA Style
Quevedo-Nolasco, A., Aguado-Rodriguez, G. (2024). A Prototype That Improves the Interpretation of Soil Moisture by Using the BGT-SEC Z2 Sensor. American Journal of Agriculture and Forestry, 12(5), 317-324. https://doi.org/10.11648/j.ajaf.20241205.11
ACS Style
Quevedo-Nolasco, A.; Aguado-Rodriguez, G. A Prototype That Improves the Interpretation of Soil Moisture by Using the BGT-SEC Z2 Sensor. Am. J. Agric. For. 2024, 12(5), 317-324. doi: 10.11648/j.ajaf.20241205.11
AMA Style
Quevedo-Nolasco A, Aguado-Rodriguez G. A Prototype That Improves the Interpretation of Soil Moisture by Using the BGT-SEC Z2 Sensor. Am J Agric For. 2024;12(5):317-324. doi: 10.11648/j.ajaf.20241205.11
@article{10.11648/j.ajaf.20241205.11,
author = {Abel Quevedo-Nolasco and Graciano-Javier Aguado-Rodriguez},
title = {A Prototype That Improves the Interpretation of Soil Moisture by Using the BGT-SEC Z2 Sensor
},
journal = {American Journal of Agriculture and Forestry},
volume = {12},
number = {5},
pages = {317-324},
doi = {10.11648/j.ajaf.20241205.11},
url = {https://doi.org/10.11648/j.ajaf.20241205.11},
eprint = {https://article.sciencepublishinggroup.com/pdf/10.11648.j.ajaf.20241205.11},
abstract = {The amount of water required to irrigate, is essential in agricultural planning. In Mexico the water required for irrigation is generally not estimated when it is carried out despite several estimation methods being available (direct and indirect). However, some methods can be very expensive, requiring preparation time to use them or time to obtain the results. One of the methods involves using sensors based on relative permittivity. This method have been widely used in agriculture because they show the percentage of water contained in the substrate. However, this value helps the producer know the soil moisture status of their crop in percentage units but does not tell them how much water needs to be added to each plant in liters. Knowing this value could help reduce water losses due to infiltration, thereby increasing the crop area. Therefore, it was developed a device capable of recommending the amount of water in v/v (volume of water/volume of soil) required to irrigate a crop. The prototype device was based on the BGT-SEC Z2TM sensor and the ATMEGA 2560TM microcontroller. The obtained device was calibrated and a specific model was developed for two types of soil: sandy (with an RMSE of 0.0107) and loamy (with an RMSE of 0.00556). With factory calibration, a RMSE value of 0.0339 was found for the loamy soil and 0.0278 for the sandy soil. In addition, the sensor was tested on strawberry plants with pots covered with and without plastic mulch (using loamy soil). The results on the strawberry plants, indicated that water consumption was best explained by the specific calibration equation for loamy soil covered with plastic mulch (67.8 mL RMSE) and without plastic mulch (82.8 mL RMSE). Finally, it was found that at least two measurements are required to obtain soil moisture average in plastic mulch strawberry pots and 6 measurements in pots without plastic mulch. With the above, it is concluded that the device developed in this study performed adequately during experiments and the sensor worked continuously without failing.
},
year = {2024}
}
TY - JOUR T1 - A Prototype That Improves the Interpretation of Soil Moisture by Using the BGT-SEC Z2 Sensor AU - Abel Quevedo-Nolasco AU - Graciano-Javier Aguado-Rodriguez Y1 - 2024/09/06 PY - 2024 N1 - https://doi.org/10.11648/j.ajaf.20241205.11 DO - 10.11648/j.ajaf.20241205.11 T2 - American Journal of Agriculture and Forestry JF - American Journal of Agriculture and Forestry JO - American Journal of Agriculture and Forestry SP - 317 EP - 324 PB - Science Publishing Group SN - 2330-8591 UR - https://doi.org/10.11648/j.ajaf.20241205.11 AB - The amount of water required to irrigate, is essential in agricultural planning. In Mexico the water required for irrigation is generally not estimated when it is carried out despite several estimation methods being available (direct and indirect). However, some methods can be very expensive, requiring preparation time to use them or time to obtain the results. One of the methods involves using sensors based on relative permittivity. This method have been widely used in agriculture because they show the percentage of water contained in the substrate. However, this value helps the producer know the soil moisture status of their crop in percentage units but does not tell them how much water needs to be added to each plant in liters. Knowing this value could help reduce water losses due to infiltration, thereby increasing the crop area. Therefore, it was developed a device capable of recommending the amount of water in v/v (volume of water/volume of soil) required to irrigate a crop. The prototype device was based on the BGT-SEC Z2TM sensor and the ATMEGA 2560TM microcontroller. The obtained device was calibrated and a specific model was developed for two types of soil: sandy (with an RMSE of 0.0107) and loamy (with an RMSE of 0.00556). With factory calibration, a RMSE value of 0.0339 was found for the loamy soil and 0.0278 for the sandy soil. In addition, the sensor was tested on strawberry plants with pots covered with and without plastic mulch (using loamy soil). The results on the strawberry plants, indicated that water consumption was best explained by the specific calibration equation for loamy soil covered with plastic mulch (67.8 mL RMSE) and without plastic mulch (82.8 mL RMSE). Finally, it was found that at least two measurements are required to obtain soil moisture average in plastic mulch strawberry pots and 6 measurements in pots without plastic mulch. With the above, it is concluded that the device developed in this study performed adequately during experiments and the sensor worked continuously without failing. VL - 12 IS - 5 ER -
Department of Hydrosciences, Postgraduate College, Texcoco, Mexico
Biography: Abel Quevedo-Nolasco is an Agronomist, Specialist in irrigation (1988), graduated from the Autonomous University of Chapingo. Master of Science in Agrometeorology (1994) with honorable mention, and Doctor of Science in Edaphology (2005), by the Postgraduate College. He made update curses at the University of Tottori, Japan and the United States Forest Service. He has participated in the training of undergraduate, master's and doctoral students. He has been a professor of the Bachelor's degree in Hydrology at the Metropolitan Autonomous University - UAM. He is currently a Research Professor of the Postgraduate Program in Hydrosciences, has published scientific articles, co- authored two books, co-translator and compiler. He is a Member of the National System of Researchers (Level 1: 2015-2018, 2021-2025). Coordinator of the first meeting on “Innovation in Water, Agriculture and Environment (2013)”. He was Coordinator of the Postgraduate Program in Hydrosciences (2015-2016).
Research Fields: Agrometeorology, Agroclimatology, Irrigation, Software Design, Hydrology.

Department of Hydrosciences, Postgraduate College, Texcoco, Mexico
Biography: Graciano-Javier Aguado-Rodriguez is an Irrigation Engineer from the Autonomous University of Chapingo and Doctor of Science in Hydrosciences from the Postgraduate College. He has an honorable mention in his undergraduate thesis and congratulations for his academic career in his doctoral thesis. He has worked at the Polytechnic University of Francisco I. Madero for eight years, teaching subjects in Agrotechnology Engineering and in the Master of Science in Sustainable Agrotechnological Development. He is a Member of the National System of Researchers (Level 1: 2021-2024). He has conducted irrigation research primarily designing prototypes that control irrigation systems. In addition, he has worked with image analysis to detect problems due to diseases in fruits.
Research Fields: Irrigation, Software Design, Water Balance in Plants, 3D Printing, Sensor Reading.

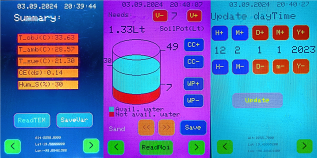
Figure 1. Variable summary menu (left), soil moisture summary menu (center), and date and time menu (right).
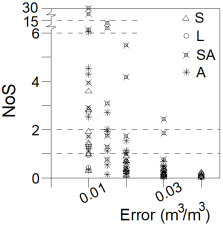
Figure 2. Sample size required, (NoS) to obtain a soil moisture mean value with an acceptable error (Error, m3/m3), with 95% confidence for the Sandy-Puebla soil (S), for the Loamy-Colpos soil (L) calibrated with homogeneous soil moisture and, for the sample size required in the soil of the pots of the strawberry crop studied without plastic mulch (SA) and with plastic mulch (A) with its variable soil moisture found in the field.
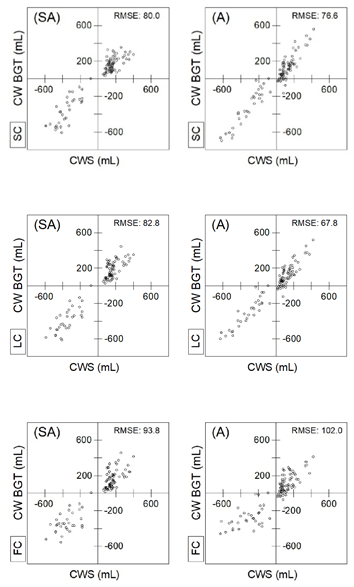
Figure 3. Water consumption obtained using the digital scale (CWS) compared to water consumption obtained using the sensor BGT-SEC Z2 (CW BGT), by using the three models: factory-calibration (FC), Loamy-Colpos calibration (LC) and Excel-Solver calibration (SC), and under two conditions: plots covered with plastic mulch (A) and without plastic mulch (SA).
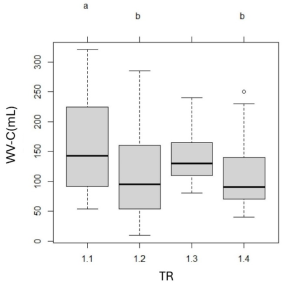
Figure 4. Tukey test results (letters above) for water consumption (WV-C) and treatments (TR): measured with the sensor (without plastic mulch “1.1” and with plastic mulch “1.2”) and, measured with a scale (without plastic mulch “1.3” and with plastic mulch “1.4”), in the Strawberry-Soil.
Information

