The rapid advancement of aerospace technology, coupled with the exponential growth in available data, has catalyzed the integration of artificial intelligence (AI) across the aerospace sector. This comprehensive review examines the state-of-the-art applications of AI, machine learning (ML), deep learning (DL), and generative artificial intelligence (GenAI) in aerospace. Our analysis reveals that ML algorithms demonstrate remarkable capabilities: Random forest (RF) algorithm achieves precision within 10 meters for trajectory prediction, while support vector machines (SVMs) algorithms show 99.89% accuracy in aircraft fault detection. Decision trees (DTs) algorithms excel in aircraft system diagnostics with adaptive learning capabilities. In the realm of deep learning, convolutional neural networks (CNNs) algorithms achieve 79% accuracy in satellite component detection and structural inspection, while recurrent neural networks (RNNs) algorithms and Long Short-Term Memory (LSTM) networks demonstrate superior performance in 4D trajectory prediction and engine health monitoring. GenAI, particularly through Generative adversarial networks (GANs), has revolutionized airfoil design optimization, achieving less than 1% error in profile fitting and 10% error in aerodynamic stealth characteristics. However, these algorithms face scalability challenges when processing large-scale datasets in real-time applications, particularly in mission-critical scenarios. Our research also identifies four ethical considerations, including bias prevention in automated systems, transparency in decision-making processes, privacy protection in data handling, and the implementation of important safety protocols. This study provides a foundation for understanding the current landscape of aerospace-AI integration while highlighting the importance of addressing ethical implications in future developments. The successful implementation of these technologies will require continuous innovation in validation methodologies, establish universal ethical considerations standard, and enhanced community engagement through citizen science initiatives to involve stakeholders.
| Published in | Journal of Civil, Construction and Environmental Engineering (Volume 10, Issue 2) |
| DOI | 10.11648/j.jccee.20251002.12 |
| Page(s) | 60-74 |
| Creative Commons |
This is an Open Access article, distributed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits unrestricted use, distribution and reproduction in any medium or format, provided the original work is properly cited. |
| Copyright |
Copyright © The Author(s), 2025. Published by Science Publishing Group |
Random Forest, Decision Tree, Convolutional Neural Network, Recurrent Neural Network, Long Short-Term Memory
 where
where  , the primal optimization problem is:
, the primal optimization problem is:  are Lagrange multipliers, and C is the regularization parameter controlling the trade-off between margin maximization and classification error minimization
are Lagrange multipliers, and C is the regularization parameter controlling the trade-off between margin maximization and classification error minimization  prevents the dot products from growing too large in magnitude. Multi-head attention extends this concept by allowing the model to attend to information from different representation subspaces simultaneously. Each attention head operates on different linear transformations of the input, and their outputs are concatenated and linearly transformed to produce the final output.
prevents the dot products from growing too large in magnitude. Multi-head attention extends this concept by allowing the model to attend to information from different representation subspaces simultaneously. Each attention head operates on different linear transformations of the input, and their outputs are concatenated and linearly transformed to produce the final output. 
 (39)
(39) AI | Artificial Intelligence |
ML | Machine Learning |
DL | Deep Learning |
GenAI | Generative Artificial Intelligence |
RF | Random Forest |
SVM | Support Vector Machine |
DT | Decision Tree |
CNN | Convolutional Neural Network |
RNN | Recurrent Neural Network |
LSTM | Long Short-Term Memory |
GBM | Gradient Boosting Machine |
ANN | Artificial Neural Network |
DRL | Deep Reinforcement Learning |
RNN | Recurrent Neural Network |
STEM | Science, Technology, Engineering, and Mathematics |
k-NN | k-Nearest Neighbor |
RBF | Radial Basis Function |
LLM | Large Language Model |
CART | Classification and Regression Tree |
NLP | Natural Language Processing |
DQN | Deep Q-Network |
MDP | Markov Decision Process |
CMA-ES | Covariance Matrix Adaptation Evolution Strategy |
GDPR | General Data Protection Regulation |
CPRA | California Privacy Rights Act |
| [1] | Hassan, K., et al., Application of Artificial Intelligence in Aerospace Engineering and Its Future Directions: A Systematic Quantitative Literature Review. Archives of Computational Methods in Engineering, 2024: p. 1-56. |
| [2] | Insaurralde, C.C. Artificial intelligence engineering for aerospace applications. in 2020 AIAA/IEEE 39th Digital Avionics Systems Conference (DASC). 2020. IEEE. |
| [3] | McCarthy, J., M.L. Minsky, N. Rochester, and C.E. Shannon, A proposal for the dartmouth summer research project on artificial intelligence, august 31, 1955. AI magazine, 2006. 27(4): p. 12-12. |
| [4] | Rajaraman, V., JohnMcCarthy—Father of artificial intelligence. Resonance, 2014. 19: p. 198-207. |
| [5] | De Cos Juez, F. J., P. G. Nieto, J. M. Torres, and J. T. Castro, Analysis of lead times of metallic components in the aerospace industry through a supported vector machine model. Mathematical and computer modelling, 2010. 52(7-8): p. 1177-1184. |
| [6] | Chen, Z., S. Cao, and Z. Mao, Remaining useful life estimation of aircraft engines using a modified similarity and supporting vector machine (SVM) approach. Energies, 2017. 11(1): p. 28. |
| [7] | Li, F., et al. A light gradient boosting machine for remainning useful life estimation of aircraft engines. in 2018 21st International Conference on Intelligent Transportation Systems (ITSC). 2018. IEEE. |
| [8] | Viale, L., A. P. Daga, A. Fasana, and L. Garibaldi, Least squares smoothed k-nearest neighbors online prediction of the remaining useful life of a NASA turbofan. Mechanical Systems and Signal Processing, 2023. 190: p. 110154. |
| [9] | Dong, X., C. J. Taylor, and T. F. Cootes, A random forest-based automatic inspection system for aerospace welds in X-ray images. IEEE Transactions on Automation Science and Engineering, 2020. 18(4): p. 2128-2141. |
| [10] | Qin, L., et al. Decision Tree-Based Resource Recommendation System for Aerospace Manufacturing. in 2024 7th International Conference on Computer Information Science and Application Technology (CISAT). 2024. IEEE. |
| [11] | Berke, L., S. Patnaik, and P. Murthy, Optimum design of aerospace structural components using neural networks. Computers & structures, 1993. 48(6): p. 1001-1010. |
| [12] | Dai, W., K. Liang, and B. Wang, State monitoring method for tool wear in aerospace manufacturing processes based on a convolutional neural network (CNN). Aerospace, 2021. 8(11): p. 335. |
| [13] | Xu, Z., W. Zeng, X. Chu, and P. Cao, Multi-aircraft trajectory collaborative prediction based on social long short-term memory network. Aerospace, 2021. 8(4): p. 115. |
| [14] | Hovell, K. C., Deep Reinforcement Learning as Guidance for Aerospace Robotics. 2022, Carleton University. |
| [15] | ElDali, M. and K. D. Kumar. Fault diagnosis and prognosis of aerospace systems using growing recurrent neural networks and LSTM. in 2021 IEEE aerospace conference (50100). 2021. IEEE. |
| [16] | Teng, D., et al., Generative adversarial surrogate modeling framework for aerospace engineering structural system reliability design. Aerospace Science and Technology, 2024. 144: p. 108781. |
| [17] | Allen, J., Aeronautics-1903; aerospace-2003. 2103. Proceedings of the Institution of Mechanical Engineers, Part G: Journal of Aerospace Engineering, 2005. 219(3): p. 235-260. |
| [18] | Neal, C. R., The Moon 35 years after Apollo: What's left to learn? Geochemistry, 2009. 69(1): p. 3-43. |
| [19] | Cortright, E. M., Apollo Expeditions to the Moon: The NASA History 50th Anniversary Edition. 2019: Courier Dover Publications. |
| [20] | Mahesh, B., Machine learning algorithms-a review. International Journal of Science and Research (IJSR). [Internet], 2020. 9(1): p. 381-386. |
| [21] | LeCun, Y., Y. Bengio, and G. Hinton, Deep learning. nature, 2015. 521(7553): p. 436-444. |
| [22] | Banh, L. and G. Strobel, Generative artificial intelligence. Electronic Markets, 2023. 33(1): p. 63. |
| [23] | Genuer, R., J.-M. Poggi, and C. Tuleau, Random Forests: some methodological insights. arXiv preprint arXiv: 0811.3619, 2008. |
| [24] | Field, L. J., J. W. Kern, and L. B. Rosman, Re-visiting projections of PCBs in Lower Hudson River fish using model emulation. Science of the Total Environment, 2016. 557: p. 489-501. |
| [25] | Azhar, S., Building information modeling (BIM): Trends, benefits, risks, and challenges for the AEC industry. Leadership and management in engineering, 2011. 11(3): p. 241-252. |
| [26] | Lee, S., W. Park, and S. Jung, Fault detection of aircraft system with random forest algorithm and similarity measure. The Scientific World Journal, 2014. 2014(1): p. 727359. |
| [27] | Joshi, A.V., Support vector machines, in Machine learning and artificial intelligence. 2022, Springer. p. 89-99. |
| [28] | Grehan, J., D. Ignatyev, and A. Zolotas, Fault detection in aircraft flight control actuators using support vector machines. Machines, 2023. 11(2): p. 211. |
| [29] | dos Santos, R. R., T. G. d. P. Machado, and S. G. P. Castro, Support vector machine applied to the optimal design of composite wing panels. Aerospace, 2021. 8(11): p. 328. |
| [30] | Fan, H.-Y., G. S. Dulikravich, and Z.-X. Han, Aerodynamic data modeling using support vector machines. Inverse Problems in Science and Engineering, 2005. 13(3): p. 261-278. |
| [31] | Yuan, X.-J., et al., Quantum support vector machines for aerodynamic classification. Intelligent Computing, 2023. 2: p. 0057. |
| [32] | Cai, H., T. Yu, and C. Xia, Quality‐Oriented Classification of Aircraft Material Based on SVM. Mathematical Problems in Engineering, 2014. 2014(1): p. 273906. |
| [33] | Ibm (2023). IBM. Retrieved 27 December 2023, from |
| [34] | Maragatharaj, K. Dinesh, R. Vimal, and Santhiyakumari; A K-NN Algorithm-Based ML Model for Predictive Maintenance in Aircraft Engines. Journal of Propulsion Technology, 2024. 45(1): p. 3083-3089. |
| [35] | Beatty, J. and S. Sundkvist, Comparative Analysis of Tree-Based Methods for Predictive Modeling. 2024. |
| [36] | Dubossarsky, E., J. H. Friedman, J. T. Ormerod, and M. P. Wand, Wavelet-based gradient boosting. Statistics and Computing, 2016. 26: p. 93-105. |
| [37] | Azo, R. (2024). AZO ROBOTICS. Retrieved 20 November 2024, from |
| [38] | Breiman, L., Classification and regression trees. 2017: Routledge. |
| [39] | Marudi, M., I. Ben-Gal, and G. Singer, A decision tree-based method for ordinal classification problems. IISE Transactions, 2024. 56(9): p. 960-974. |
| [40] | Sun, Z., et al., An improved random forest based on the classification accuracy and correlation measurement of decision trees. Expert Systems with Applications, 2024. 237: p. 121549. |
| [41] | Ignatenko, V., A. Surkov, and S. Koltcov, Random forests with parametric entropy-based information gains for classification and regression problems. PeerJ Computer Science, 2024. 10: p. e1775. |
| [42] | Segev, I., J. Martin, and R. Knight, Math That Changed the World. 2024: Frontiers Media SA. |
| [43] | Rojas, R. V. B., Artificial Intelligence: Genesis, Development, and Future, in Revolutionizing Communication. 2024, CRC Press. p. 1-15. |
| [44] | Lu, M. and N. Ke. LeNet-5 handwritten digit recognition based on deep learning. in International Conference on Optics, Electronics, and Communication Engineering (OECE 2024). 2024. SPIE. |
| [45] | Zhang, H., Y. Zhang, Q. Feng, and K. Zhang, Review of Machine-Learning Approaches for Object and Component Detection in Space Electro-optical Satellites. International Journal of Aeronautical and Space Sciences, 2024. 25(1): p. 277-292. |
| [46] | Chen, Y., J. Gao, and K. Zhang, R-CNN-Based Satellite Components Detection in Optical Images. International Journal of Aerospace Engineering, 2020. 2020(1): p. 8816187. |
| [47] | Gallon, R., F. Schiemenz, A. Menicucci, and E. Gill, Convolutional Neural Network Design and Evaluation for Real-Time Multivariate Time Series Fault Detection in Spacecraft Attitude Sensors. arXiv preprint arXiv:2410.09126, 2024. |
| [48] | Katte, T., Recurrent neural network and its various architecture types. International Journal of Research and Scientific Innovation (IJRSI), 2018. 5(3): p. 124-129. |
| [49] | Wu, J., Y. Ye, and J. Du, Autonomous Drones in Urban Navigation: Autoencoder Learning Fusion for Aerodynamics. Journal of Construction Engineering and Management, 2024. 150(7): p. 04024067. |
| [50] | Hu, X., H. Wang, M. Gong, and T. Wang, Guidance Design for Escape Flight Vehicle against Multiple Pursuit Flight Vehicles Using the RNN-Based Proximal Policy Optimization Algorithm. Aerospace, 2024. 11(5): p. 361. |
| [51] | Middlehurst, M., P. Schäfer, and A. Bagnall, Bake off redux: a review and experimental evaluation of recent time series classification algorithms. Data Mining and Knowledge Discovery, 2024: p. 1-74. |
| [52] | Sha, X., Time Series Stock Price Forecasting Based on Genetic Algorithm (GA)-Long Short-Term Memory Network (LSTM) Optimization. arXiv preprint arXiv: 2405.03151, 2024. |
| [53] | Vaswani, A., et al., Attention Is All You Need. (Nips), 2017. arXiv preprint arXiv: 1706.03762, 2017. 10: p. S0140525X16001837. |
| [54] | Zhu, L., et al., DRL-RNP: Deep Reinforcement Learning-Based Optimized RNP Flight Procedure Execution. Sensors, 2022. 22(17): p. 6475. |
| [55] | Hochreiter, S., Long Short-term Memory. Neural Computation MIT-Press, 1997. |
| [56] |
Presidio (2024). Presidio. Retrieved 27 May 2024
https://www.presidio.com/exploring-the-power-of-generative-adversarial-networks-gans-with-azure/ |
| [57] | Jin, S.-Y., et al., Airfoil aerodynamic/stealth design based on conditional generative adversarial networks. Physics of Fluids, 2024. 36(7). |
| [58] |
Repository, T. (2024). Repository TUdelft. Retrieved 01 January 2024.
https://repository.tudelft.nl/record/uuid:3beee043-9afc-41a2-8933-e2bc75893b24#abstract |
| [59] | Fanfarillo, A., B. Roozitalab, W. Hu, and G. Cervone, Probabilistic forecasting using deep generative models. GeoInformatica, 2021. 25: p. 127-147. |
| [60] | Lopez-Alvis, J., E. Laloy, F. Nguyen, and T. Hermans, Deep generative models in inversion: The impact of the generator's nonlinearity and development of a new approach based on a variational autoencoder. Computers & Geosciences, 2021. 152: p. 104762. |
| [61] | Chen, W., K. Chiu, and M. Fuge. Aerodynamic design optimization and shape exploration using generative adversarial networks. in AIAA Scitech 2019 forum. 2019. |
| [62] | Arias-Montano, A., C. A. C. Coello, and E. Mezura-Montes, Multiobjective evolutionary algorithms in aeronautical and aerospace engineering. IEEE transactions on evolutionary computation, 2012. 16(5): p. 662-694. |
| [63] | Anderson, M. B. (2002, May). Genetic algorithms in aerospace design: substantial progress, tremendous potential. In Brussels: NATO/Von Karmen Institute Workshop on Intelligent System. |
| [64] | Holst, T. L., Genetic algorithms applied to multi-objective aerodynamic shape optimization. 2005. |
| [65] | Furfaro, R., A. D'Ambrosio, E. Schiassi, and A. Scorsoglio. Physics-informed neural networks for closed-loop guidance and control in aerospace systems. in AIAA SCITECH 2022 Forum. 2022. |
| [66] | Eivazi, H., M. Tahani, P. Schlatter, and R. Vinuesa, Physics-informed neural networks for solving Reynolds-averaged Navier–Stokes equations. Physics of Fluids, 2022. 34(7). |
| [67] | Hagos, D. H. and D. B. Rawat, Neuro-Symbolic AI for Military Applications. IEEE Transactions on Artificial Intelligence, 2024. |
| [68] | Raz, A. K., E. P. Blasch, C. Guariniello, and Z. T. Mian. An overview of systems engineering challenges for designing AI-enabled aerospace systems in AIAA Scitech 2021 Forum. 2021. |
| [69] | Protopapadakis, G., A. Apostolidis, and A. I. Kalfas. Explainable and interpretable AI-assisted remaining useful life estimation for aeroengines. in Turbo Expo: Power for Land, Sea, and Air. 2022. American Society of Mechanical Engineers. |
| [70] | Sharma, S. and M. S. Graydon, Social bias in AI and its implications. 2021. |
| [71] | Tortora, L., Beyond Discrimination: Generative AI Applications and Ethical Challenges in Forensic Psychiatry. Frontiers in Psychiatry, 2024. 15: p. 1346059. |
| [72] |
Iata (2024). IATA. Retrieved 01 May 2024.
https://www.iata.org/contentassets/da67b41b565c4bd88d5944b136cc8d15/data-protection-white-paper.pdf |
| [73] | Enzuzo.(2024). Enzuzo. Retrieved 04 November 2024. |
| [74] |
Qoco (2024). Ooco. Retrived 22 May 2024.
https://www.qoco.aero/blog/ai-in-aviation-maintenance-how-its-changing-the-industry |
| [75] | Aiola (2024). Aiola. Retrieved 24 July 2024. |
| [76] | Eubank, R., E. Atkins, and S. Ogura. Fault detection and fail-safe operation with a multiple-redundancy air-data system. in AIAA Guidance, Navigation, and Control Conference. 2010. |
APA Style
Mirindi, D., Sinkhonde, D., Mirindi, F., Bezabih, T. (2025). A Review on Aerospace-AI, with Ethics and Implications. Journal of Civil, Construction and Environmental Engineering, 10(2), 60-74. https://doi.org/10.11648/j.jccee.20251002.12
ACS Style
Mirindi, D.; Sinkhonde, D.; Mirindi, F.; Bezabih, T. A Review on Aerospace-AI, with Ethics and Implications. J. Civ. Constr. Environ. Eng. 2025, 10(2), 60-74. doi: 10.11648/j.jccee.20251002.12
@article{10.11648/j.jccee.20251002.12,
author = {Derrick Mirindi and David Sinkhonde and Frederic Mirindi and Tajebe Bezabih},
title = {A Review on Aerospace-AI, with Ethics and Implications
},
journal = {Journal of Civil, Construction and Environmental Engineering},
volume = {10},
number = {2},
pages = {60-74},
doi = {10.11648/j.jccee.20251002.12},
url = {https://doi.org/10.11648/j.jccee.20251002.12},
eprint = {https://article.sciencepublishinggroup.com/pdf/10.11648.j.jccee.20251002.12},
abstract = {The rapid advancement of aerospace technology, coupled with the exponential growth in available data, has catalyzed the integration of artificial intelligence (AI) across the aerospace sector. This comprehensive review examines the state-of-the-art applications of AI, machine learning (ML), deep learning (DL), and generative artificial intelligence (GenAI) in aerospace. Our analysis reveals that ML algorithms demonstrate remarkable capabilities: Random forest (RF) algorithm achieves precision within 10 meters for trajectory prediction, while support vector machines (SVMs) algorithms show 99.89% accuracy in aircraft fault detection. Decision trees (DTs) algorithms excel in aircraft system diagnostics with adaptive learning capabilities. In the realm of deep learning, convolutional neural networks (CNNs) algorithms achieve 79% accuracy in satellite component detection and structural inspection, while recurrent neural networks (RNNs) algorithms and Long Short-Term Memory (LSTM) networks demonstrate superior performance in 4D trajectory prediction and engine health monitoring. GenAI, particularly through Generative adversarial networks (GANs), has revolutionized airfoil design optimization, achieving less than 1% error in profile fitting and 10% error in aerodynamic stealth characteristics. However, these algorithms face scalability challenges when processing large-scale datasets in real-time applications, particularly in mission-critical scenarios. Our research also identifies four ethical considerations, including bias prevention in automated systems, transparency in decision-making processes, privacy protection in data handling, and the implementation of important safety protocols. This study provides a foundation for understanding the current landscape of aerospace-AI integration while highlighting the importance of addressing ethical implications in future developments. The successful implementation of these technologies will require continuous innovation in validation methodologies, establish universal ethical considerations standard, and enhanced community engagement through citizen science initiatives to involve stakeholders.
},
year = {2025}
}
TY - JOUR T1 - A Review on Aerospace-AI, with Ethics and Implications AU - Derrick Mirindi AU - David Sinkhonde AU - Frederic Mirindi AU - Tajebe Bezabih Y1 - 2025/03/11 PY - 2025 N1 - https://doi.org/10.11648/j.jccee.20251002.12 DO - 10.11648/j.jccee.20251002.12 T2 - Journal of Civil, Construction and Environmental Engineering JF - Journal of Civil, Construction and Environmental Engineering JO - Journal of Civil, Construction and Environmental Engineering SP - 60 EP - 74 PB - Science Publishing Group SN - 2637-3890 UR - https://doi.org/10.11648/j.jccee.20251002.12 AB - The rapid advancement of aerospace technology, coupled with the exponential growth in available data, has catalyzed the integration of artificial intelligence (AI) across the aerospace sector. This comprehensive review examines the state-of-the-art applications of AI, machine learning (ML), deep learning (DL), and generative artificial intelligence (GenAI) in aerospace. Our analysis reveals that ML algorithms demonstrate remarkable capabilities: Random forest (RF) algorithm achieves precision within 10 meters for trajectory prediction, while support vector machines (SVMs) algorithms show 99.89% accuracy in aircraft fault detection. Decision trees (DTs) algorithms excel in aircraft system diagnostics with adaptive learning capabilities. In the realm of deep learning, convolutional neural networks (CNNs) algorithms achieve 79% accuracy in satellite component detection and structural inspection, while recurrent neural networks (RNNs) algorithms and Long Short-Term Memory (LSTM) networks demonstrate superior performance in 4D trajectory prediction and engine health monitoring. GenAI, particularly through Generative adversarial networks (GANs), has revolutionized airfoil design optimization, achieving less than 1% error in profile fitting and 10% error in aerodynamic stealth characteristics. However, these algorithms face scalability challenges when processing large-scale datasets in real-time applications, particularly in mission-critical scenarios. Our research also identifies four ethical considerations, including bias prevention in automated systems, transparency in decision-making processes, privacy protection in data handling, and the implementation of important safety protocols. This study provides a foundation for understanding the current landscape of aerospace-AI integration while highlighting the importance of addressing ethical implications in future developments. The successful implementation of these technologies will require continuous innovation in validation methodologies, establish universal ethical considerations standard, and enhanced community engagement through citizen science initiatives to involve stakeholders. VL - 10 IS - 2 ER -
School of Architecture and Planning, Morgan State University, Baltimore, USA
Department of Civil and Construction Engineering, Pan African University Institute for Basic Sciences, Technology and Innovation, Nairobi, Kenya
Department of Economics, University of Manitoba, Winnipeg, Canada
Department of Civil and Construction Engineering, Pan African University Institute for Basic Sciences, Technology and Innovation, Nairobi, Kenya
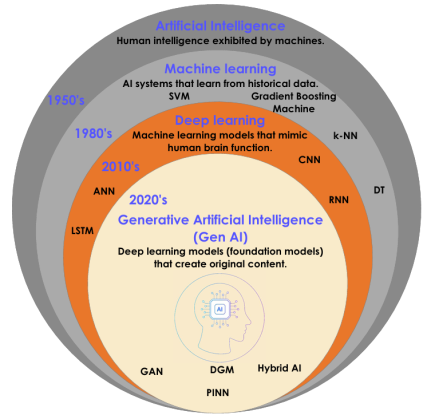
Figure 1. Schematic representation of AI, ML, DL, and GenAI in aerospace context.

Figure 2. Decision tree algorithm architecture.
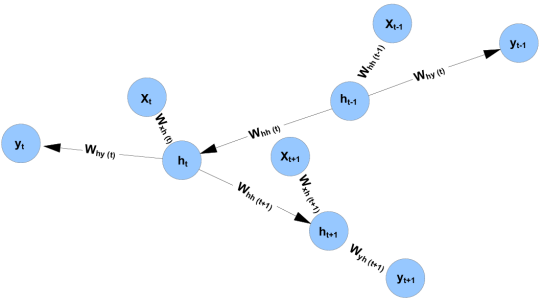
Figure 3. RNN architecture connections description (with time steps t-1, t, and t+1, including hidden state ht, input xt, and output yt, with weight matrices Whh, Wxh, and Why labeled).
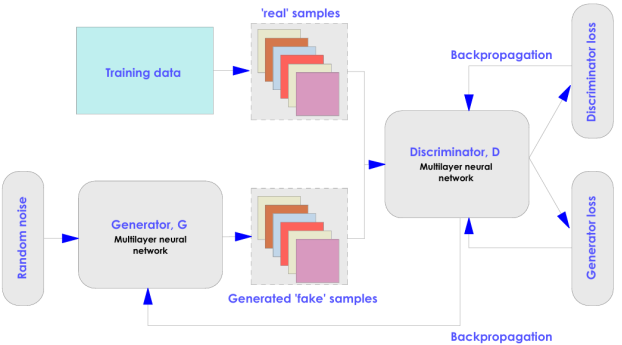
Figure 4. Generative Adversarial Networks architecture.
Information

